Mini
Humanoid Project
This project was
carried out between June 2000 and January 2001
K. Wolff, and P. Nordin
Aim and Introduction
|
The mini humanoid, called Elvina(*), is a somewhat simplified, scaled
model of a full-size humanoid with body dimensions that mirrors
the dimensions of a human. It is a relatively cheap platform,
primarely intended for doing research in humanoid robotics, and
studying biped locomotion. Since it is small, cheap, and lightweight,
the creation of multiple instances would well serve the purpose
for studying multi-robot teams.
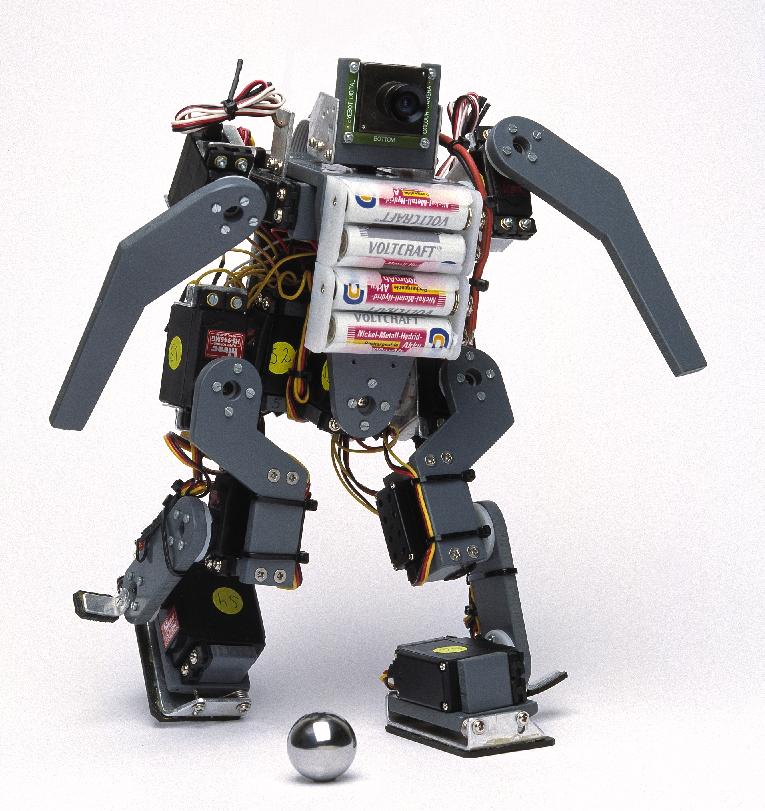
Elvina is a fully autonomous
robot with onboard power supply and computer. It is 28 cm tall
and it weights about 1.5 kg including batteries. Each of the
two legs has 5 degrees of freedom, of which 4 dof is active and
1 dof is passive. The head, the torso and the arms has 1 dof
each, giving a total of 14 dof. The robot is equipped with a
color camera, mounted in its head. The computer is attached to
the back of the robot's body. The body also houses a near-infrared
PSD (position sensitive detector) that is used to determine distances
to nearby objects.
In its present status,
the robot is capable of static walking.
Meet Elvinas twin brother
ZORC, who lives in Dortmund, Germany!
(*the robot was named Elvina
by the childrens watching "Hjärnkontoret", which
is a science tv program for kids.) |
|
Experiments
|
An evolutionary experiment was conducted
with Elvina, in order to optimize a previously by hand specified
gait cycle. The onboard camera and distance sensor was used to
obtain feedback to an evolutionary algorithm, which was used
to optimize the robots gait. The outcome of the experiment was
that the robot could walk in a straighter path than before, but
not much faster. |
 |
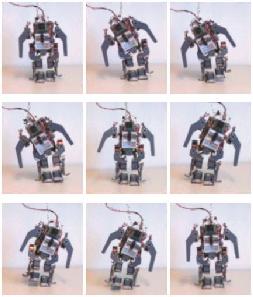 |
Elvina is walking in a way that could best
be described as a semi-static walk. During the gait cycle, the
robot is statically supported by at least one leg an appreciable
amount time. There are however dynamical phases in the gait cycle
too, as when the supporting leg is changed from left to right,
and from right to left.
The picture to the left is showing exactly
one gait cycle, starting with the lifting of the left leg, taking
one step with it, lifting the right leg, taking one step with
that leg, and ending up in the same position as before (but closer
to the camera :)). |
Construction
|
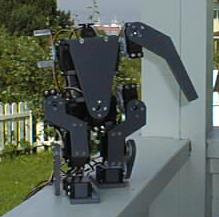
These pictures shows the robot in an incomplete
stadium of its assembly. The robots actuators are 14 Hitec mini
servos, mounted in a chassis/skeleton made of 6mm thick blank
PVC panel. This is an excellent prototyping material for robotics.
It is light weight yet strong and durable. It can be easily drilled,
machined, or cut with most types of hand or power tools. |
 |
 |
The height of the robot, when it is
completed with camera and other stuff, will be approxemately
23 cm, and its weight is estimated to be around 1000g. |
|
The EyeBot controller will be attached to
the back of the robot and the batteries on its front (chest).
This arrangement will keep the center of gravity in a position
that assures good balancing. |
 |
Publications
- Wolff, K., and Nordin,
P. (2002). "Evolution of Efficient Gait with an Autonomous
Biped Robot using Visual Feedback." In van Amerongen, J.,
Jonker, J., Regtien, P., Stramigioli, S., editors, Proceedings
of the 8th Mechatronics Forum International Conference 2002 (pp
504-513). June 24-26 2002, University of Twente, Enschede, Netherlands.
- Wolff, K., and Nordin,
P. (2001). "Evolution of Efficient Gait with an Autonomous
Biped Robot using Visual Feedback."
In Late-Breaking Papers of the 2001 Genetic and Evolutionary
Computation Conference, GECCO 2001. (pp. 482-489). San Francisco:
Morgan Kaufmann Publishers, Inc.
- Ziegler, J., Wolff, K.,
Nordin, P., and Banzhaf, W. (2001). "Constructing a small
humanoid walking robot as a platform for the genetic evolution
of walking." In U. Rückert, J. Sitte and U. Witkowski,
editors, Proceedings of the 5th International Heinz Nixdorf Symposium:
Autonomous Minirobots for Research and Edutainment, AMiRE 2001
(pp. 51-59). Paderborn, Germany: Heinz Nixdorf Institute, University
of Paderborn.
These papers can be downloaded
from Krister Wolff's publications
page.
Home
Standard Disclaimer
Updated: April
28, 2004, webmaster: Krister Wolff, email: krister.wolff at mc2.chalmers.se |